Microdinkel Workshop
Hintergrund
Kleine, kostengünstige Roboter sind eine begeisternde Möglichkeit für Menschen ini tial mit dem Feld der Robotik in Kontakt zu kommen. Deswege habe ich zusammen mit anderen Menschen den Mikrodinkel entwickelt und einen Workshop organisiert, auf dem sich jeder Teilnehmer einen Mikrodinkel während nur einem Abends gebaut hat.
tial mit dem Feld der Robotik in Kontakt zu kommen. Deswege habe ich zusammen mit anderen Menschen den Mikrodinkel entwickelt und einen Workshop organisiert, auf dem sich jeder Teilnehmer einen Mikrodinkel während nur einem Abends gebaut hat.
Aufgabenstellung und Anforderungen
Besonders wichtig war, dass der Roboter nur aus wenigen Teilen besteht und an einem Abend von einem ungeübten Menschen zusammengesetzt werden kann. Weiterhin war es notwendig die Kosten pro Roboter so gering zu halten, dass auch ein Schüler oder Student sich einen solchen leisten konnte.
Tätigkeiten
Ein anderes Mitglied des Vereins c-base e.V. hatte die Idee für die mechanische, sechs-beinige Fortbewegung und entwickelte einen einfachen Prototypen. Diesen Prototypen habe ich weiterentwickelt, die Anzahl der notwendigen Teile signifikant reduziert und die Teile mechanisch vereinfacht um die Fertigung zu beschleunigen.
Ich kümmerte mich um den Einkauf der notwendigen Teile und bestellte beispielsweise die Servos aus China um Skaleneffekte zu nutzen und die Preise günstig zu halten. Die Platinen für die elektronische Steuerung wurden ebenso in China nach unserem Auftrag gefertigt und die elektronischen Komponenten wurden von zwei verschiedenen deutschen Händlern eingekauft.
Funktionsweise
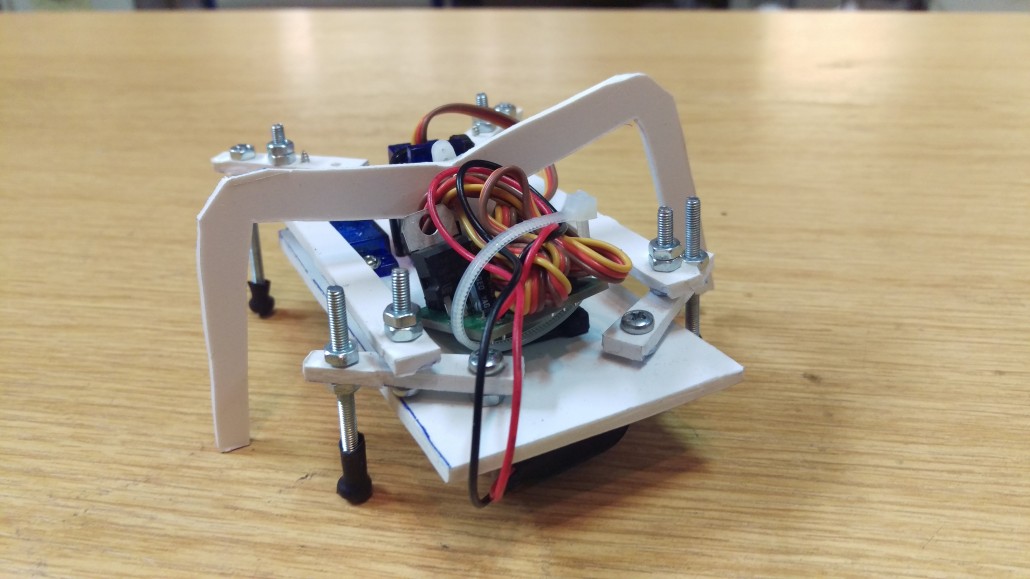
Der Roboter hat sechs Beine, aber nur drei Servos. Die vorderen und hinteren Beine können sich nur vor und zurück bewegen. Dabei steuert pro Seite ein Servo beide Beine gleichzeitig. Das mittlere Beinpaar kann den Roboter entweder auf der linken oder auf der rechten Seite hochdrücken, so dass das vordere und hintere Bein auf der angehobenen Seite frei schweben.
Während die Beine keinen Bodenkontakt haben, kann der jeweilige Servo die Beine auf der angehobenen Seite nach vorne bewegen. Wenn das mittlere Beinpaar in Neutralstellung ist und beide Beinpaare nach vorne bewegt wurden, berührt das mittlere Beinpaar den Boden nicht und der Roboter kann alle vier äußeren Beine nach hinten bewegen, wobei er sich vorwärts bewegt.
Weiterhin hat der Roboter vorne kleine Taster, die bei Kontakt eine Richtungsänderung des Roboters auslösen.
Kosten
Die Kosten für einen dieser Roboter betrugen 30€. Diese Kosten wurden von jedem Teilnehmer selbst getragen.
3D-gedruckte Variante
Nachdem erfolgreichen Workshop habe ich das Design überarbeitet und eine Variante davon erstellt, die vollständig 3D-druckbar ist. Dieses Design habe ich auf Thingiverse als Thing no. 5156 veröffentlicht.







